Linux v7.0 was released on April 12, 2026. BayLibre contributed 127 authored commits across multiple subsystems. Driver Core: Bus Method Migration Uwe Kleine-König continued a…
Zephyr v4.4.0 was released on April 14, 2026. BayLibre contributed 256 authored commits spanning cryptography, ARM64 architecture, LoRa/LoRaWAN, and driver support. Cryptography: Mbed TLS 4.x…
U-Boot v2026.04 was released on April 6, 2026. MediaTek Clock Driver David Lechner overhauled the MediaTek clock driver infrastructure in this release. The first area…
Linus released Linux 6.19 on February 8, 2026. BayLibre contributed 49 authored commits to this release across several subsystems. IIO ADC: AD7124 David Lechner fixed…
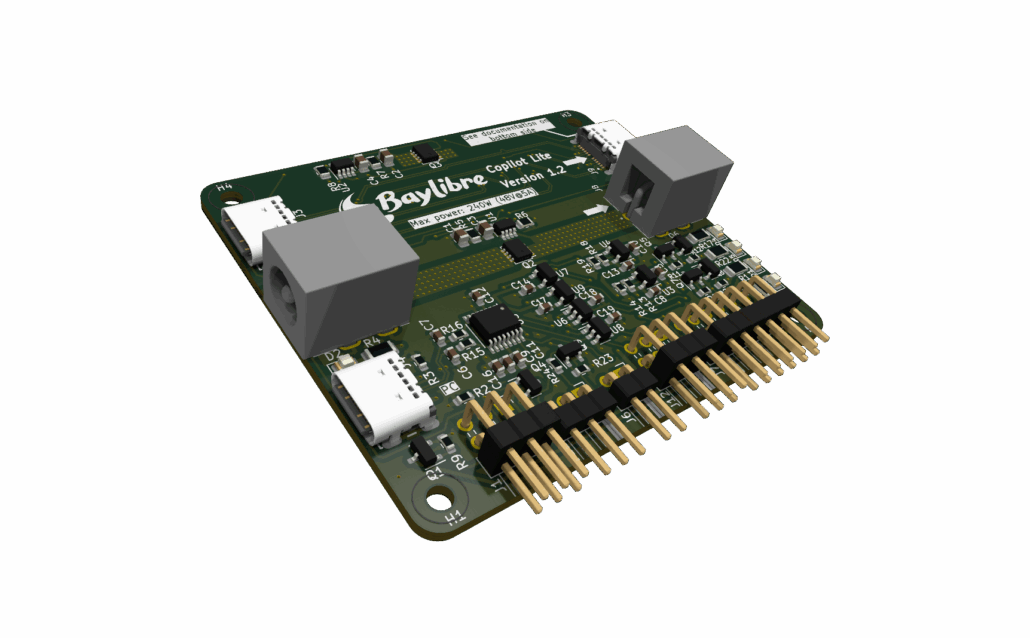
We’re thrilled to announce that BayLibre has open-sourced Copilot! Don’t worry, this Copilot has nothing to do with Microsoft or AI; it won’t write your…