Our contributions to Zephyr v3.1.0

Our contributions to Zephyr v3.0.0
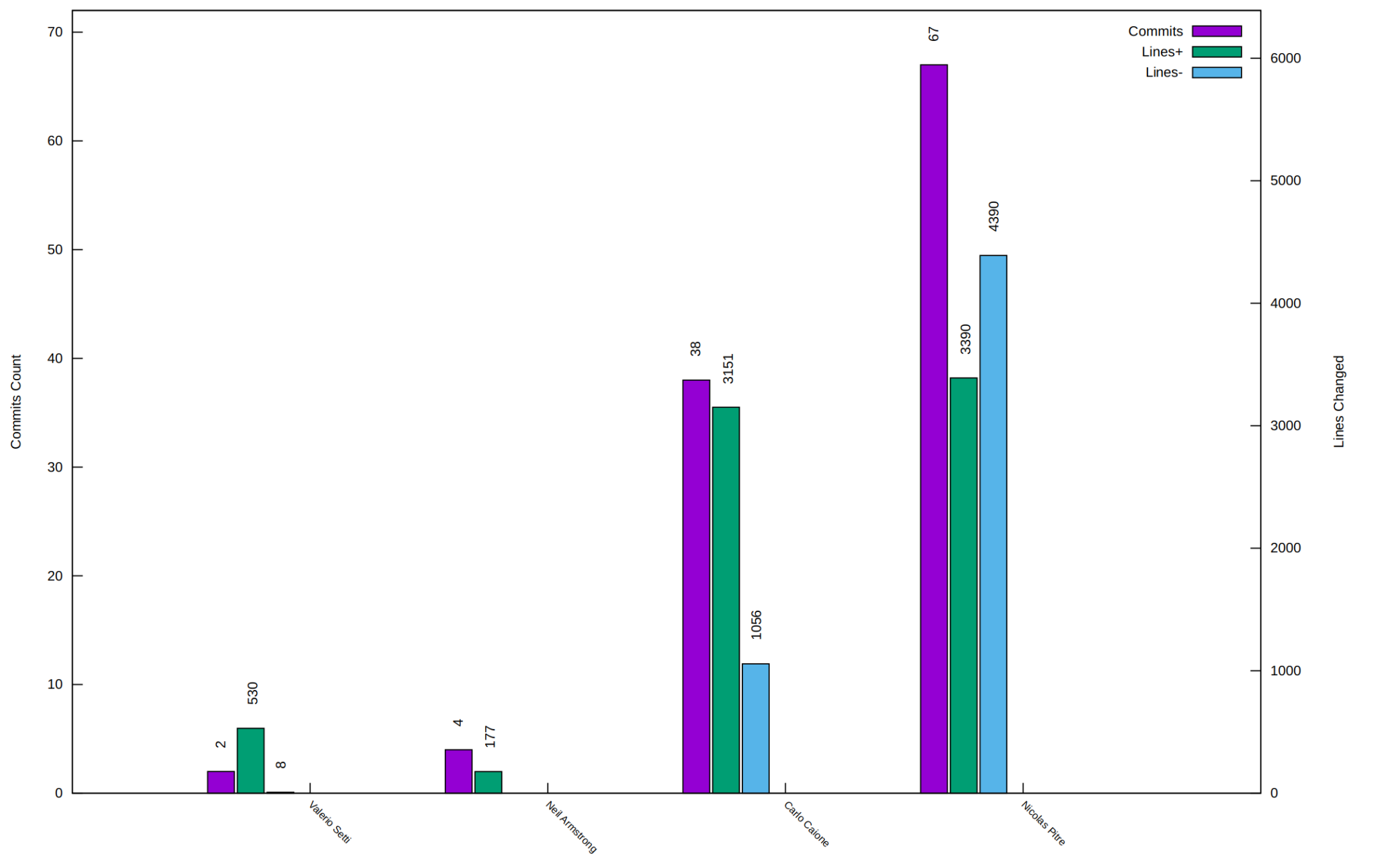
BayLibre is a member of the Zephyr Project and has been a core contributor from the beginning with over 650 commits. Zephyr v3.0.0 is the most recent release, and these are the contributions from our team.

RISC-V PMP and Zephyr RTOS — a new user(space) has entered
Introduction Adoption of the RISC-V open standard ISA continues to grow, along with increased market acceptance of solutions based on RISC-V designs. With this adoption…
When 32 bits isn’t enough — Porting Zephyr to RISCV64
Conventional wisdom says you should normally apply small microcontrollers to dedicated applications with constrained resources. 8-bit microcontrollers with a few kilobytes of memory are still…